Kushal Kedia
kk837@cornell.edu

Postdoc
I am a postdoc at MIT, working with Prof. Pulkit Agrawal. I received my Ph.D. in Computer Science from Cornell University, advised by Prof. Sanjiban Choudhury and Prof. Wei-Chiu Ma. During my Ph.D., I was a visiting researcher at Stanford University with Prof. Jeannette Bohg and Prof. C. Karen Liu. Before that, I completed my B.Tech at IIT Kharagpur.
My research goal is to build dexterous robots that can perform manipulation tasks which are difficult to demonstrate for humans. Towards this goal, I work on lifelong RL algorithms that enable robots to acquire these capabilities from their own experience. I believe such robots will augment humans in everyday life and work.
Link to CV.
News
| Jun, 2026 | Our paper SimToolReal has been accepted to RSS 2026 and won a Best Poster award at the Dexterous Manipulation Workshop at ICRA 2026! SimToolReal learns an object-centric policy for zero-shot dexterous tool manipulation. |
|---|---|
| May, 2026 | I am organizing the Beyond Teleoperation workshop at ICRA 2026, imagining a future where robots are trained without any teleoperation data. |
| Feb, 2026 | Gave invited talks on SimToolReal at the Dexterity Team at NVIDIA, Google DeepMind, the ROAM Lab at Columbia University, and GRAIL at NYU. |
| Oct, 2025 | Gave invited talks on “Moving Beyond Teleoperation: Robot Learning from Human Videos” at the University of Michigan’s Computation HRI course (course link), the Robotics Mobility Team at NVIDIA, and the Foundation Models Team at the RAI Institute. |
| Aug, 2025 | Our paper X-Sim received an oral presentation at CoRL 2025 and a Best Paper (runner-up) award at the EgoAct Workshop at RSS 2025. X-Sim trains real‑world image‑based robot policies entirely in simulation, without any teleoperation data. |
| Apr, 2025 | Cornell Chronicle featured our ICRA 2025 paper on RHyME (Retrieval for Hybrid Imitation under Mismatched Execution): “Robot see, robot do: System learns after watching how-tos.” |
| Oct, 2024 | Gave invited talks on “Transferring Collaborative Behaviors from Human-Human Teams” at RPM Lab, University of Minnesota and RobIn Lab, UT Austin. |
| May, 2024 | Released MOSAIC, a year-long collaborative effort combining multiple foundation models to build a multi-robot collaborative cooking system. MOSAIC won the Best Paper award at the VLMNM workshop and the Best Poster at the MoMa workshop @ ICRA 2024! |
| Sep, 2023 | Excited to release the Collaborative Manipulation Dataset (CoMaD)! CoMaD captures over 6 hours of motion data from 14 unique users involving both human-human and human-robot (Franka robot arm) interactions in a kitchen setting. |
Selected Papers
-
 Play2Perfect: What Matters in Dexterous Play Pretraining for Precise Assembly?arXiv 2026
Play2Perfect: What Matters in Dexterous Play Pretraining for Precise Assembly?arXiv 2026 -
 SimToolReal: An Object-Centric Policy for Zero-Shot Dexterous Tool ManipulationRSS 2026
SimToolReal: An Object-Centric Policy for Zero-Shot Dexterous Tool ManipulationRSS 2026
Best Poster @ Dexterous Manipulation Workshop, ICRA 2026 -
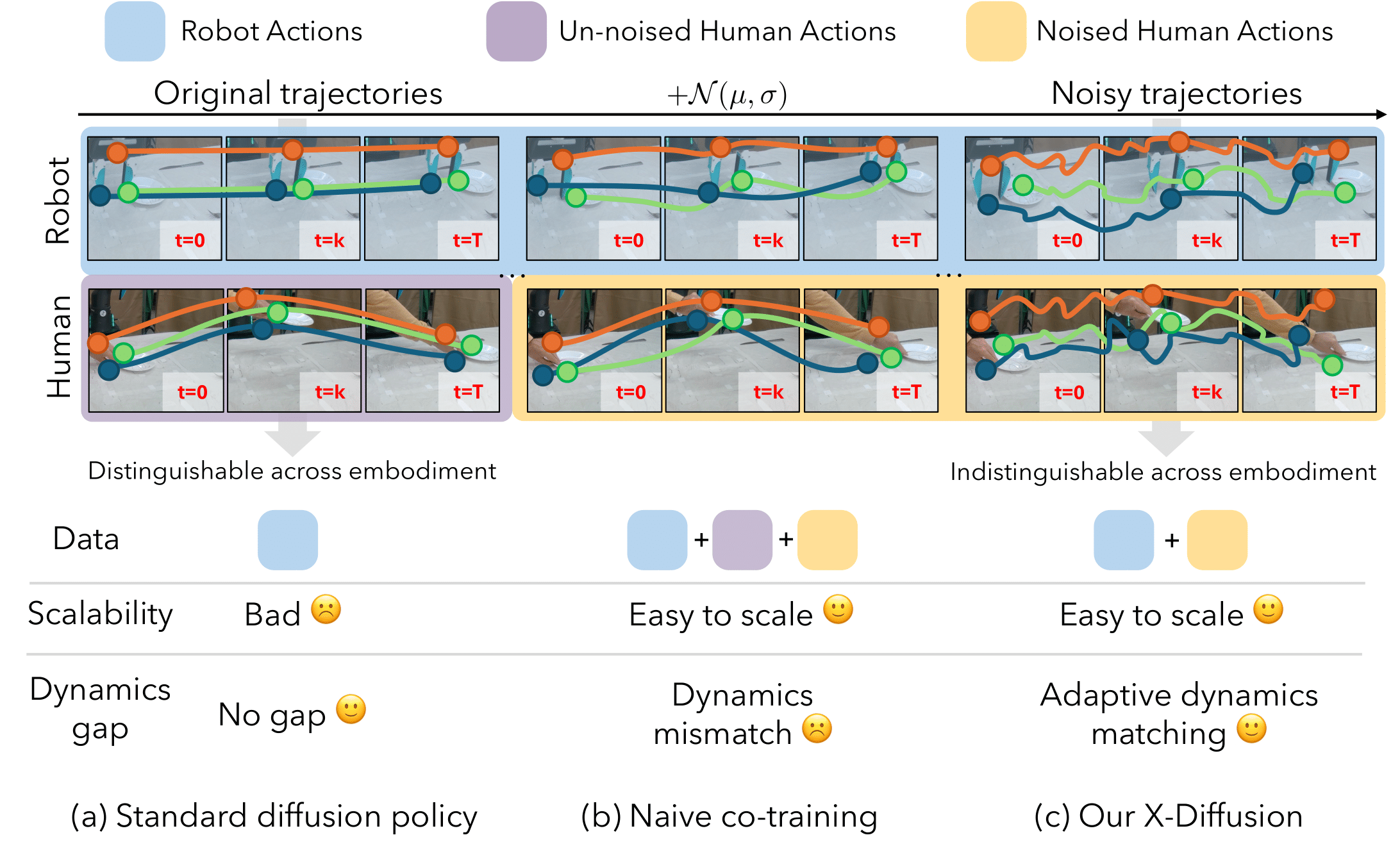 X-Diffusion: Training Diffusion Policies on Cross-Embodiment Human DemonstrationsICRA 2026
X-Diffusion: Training Diffusion Policies on Cross-Embodiment Human DemonstrationsICRA 2026 -
 X-Sim: Cross-Embodiment Learning via Real-to-Sim-to-RealOral Presentation @ CoRL 2025
X-Sim: Cross-Embodiment Learning via Real-to-Sim-to-RealOral Presentation @ CoRL 2025
Best Paper (Runner-Up) @ EgoAct Workshop, RSS 2025 -
-
 MOSAIC: Modular Foundation Models for Assistive and Interactive CookingCoRL 2024
MOSAIC: Modular Foundation Models for Assistive and Interactive CookingCoRL 2024
Best Paper @ VLNMN Workshop, ICRA 2024
Best Poster @ MoMa Workshop, ICRA 2024 -
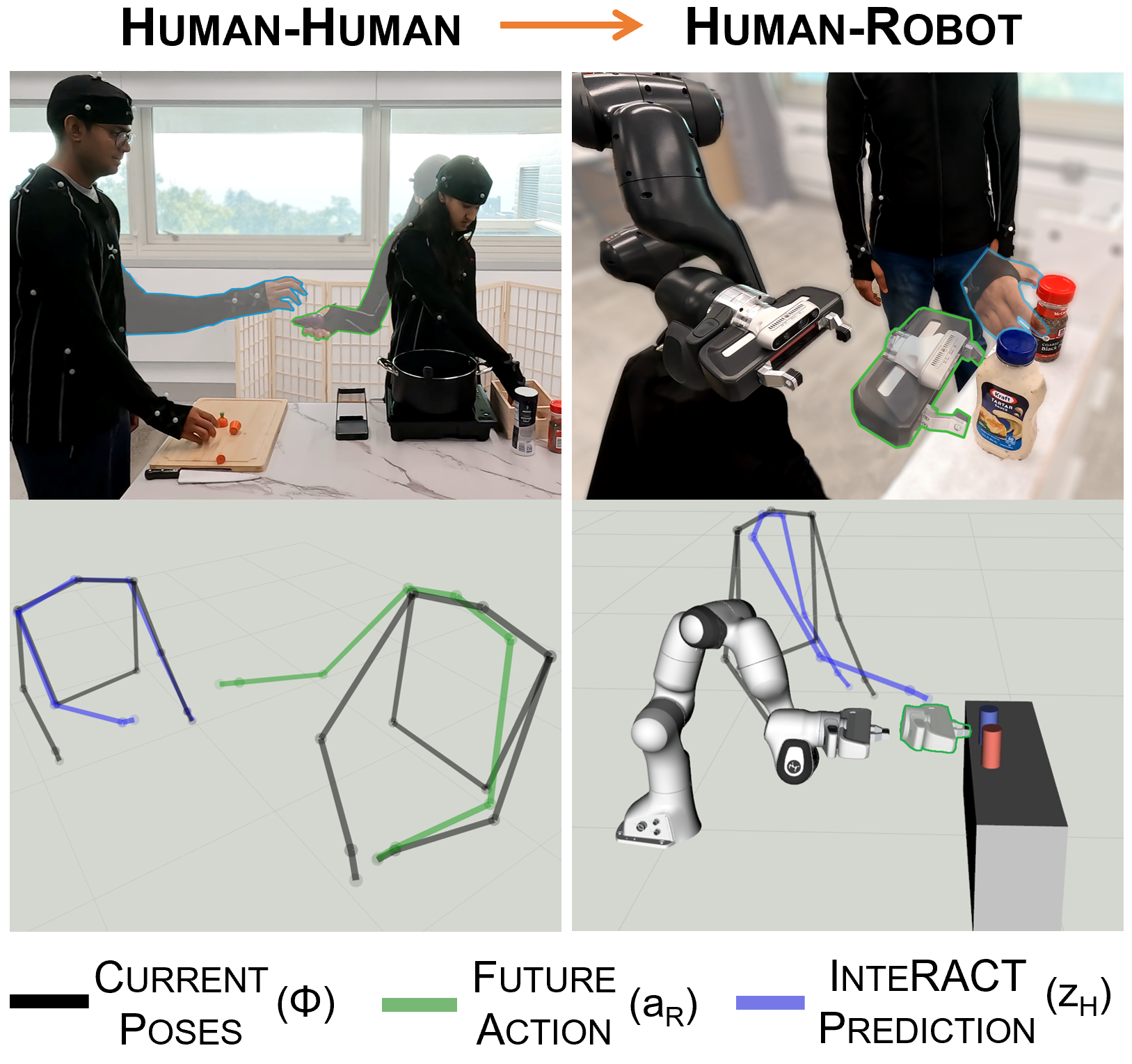 InteRACT: Transformer Models for Human Intent Prediction Conditioned on Robot ActionsICRA 2024
InteRACT: Transformer Models for Human Intent Prediction Conditioned on Robot ActionsICRA 2024 -
 ManiCast: Collaborative Manipulation with Cost-Aware Human ForecastingCoRL 2023
ManiCast: Collaborative Manipulation with Cost-Aware Human ForecastingCoRL 2023 -