Publications
-
 SimToolReal: An Object-Centric Policy for Zero-Shot Dexterous Tool ManipulationArXiv
SimToolReal: An Object-Centric Policy for Zero-Shot Dexterous Tool ManipulationArXiv -
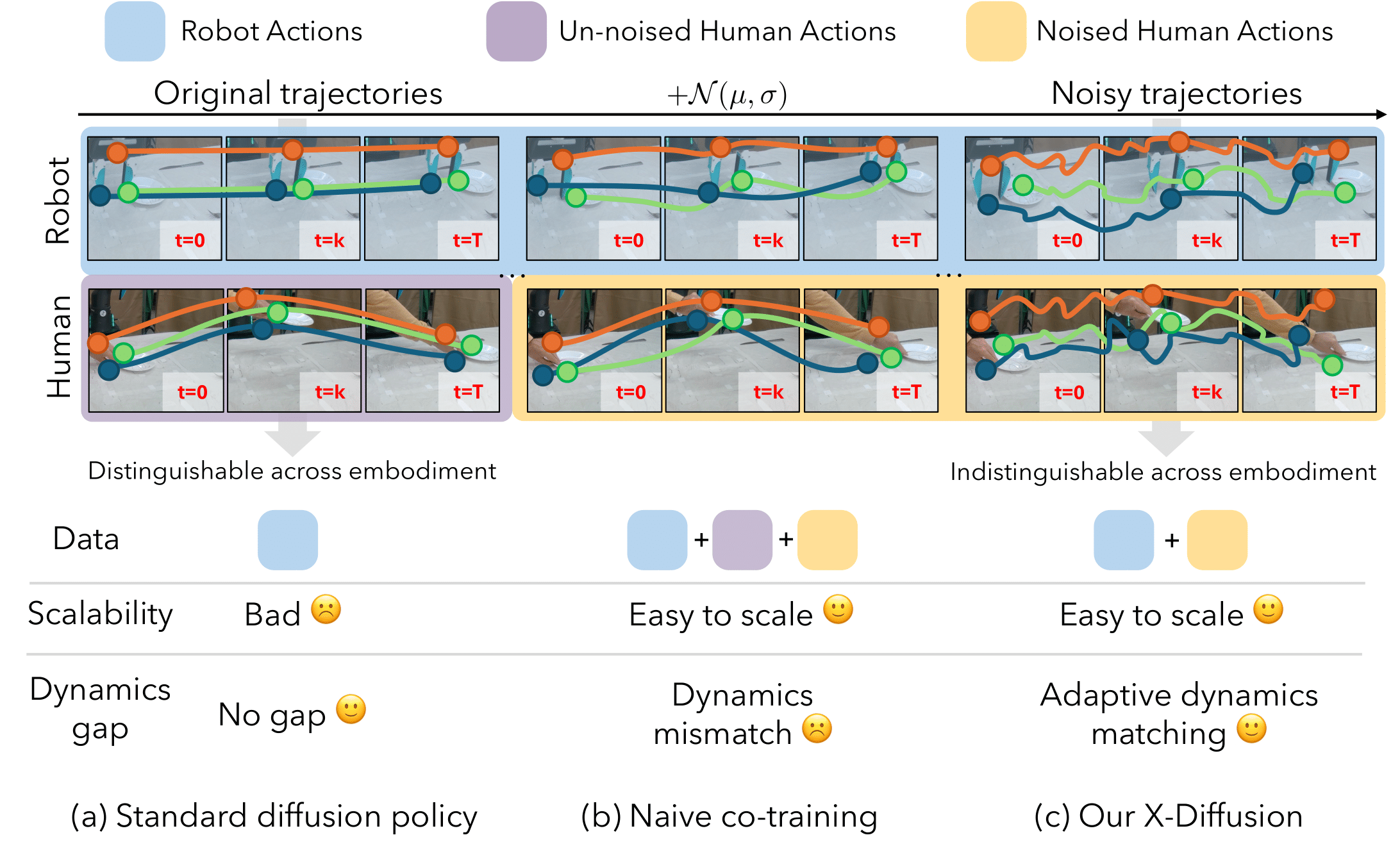 X-Diffusion: Training Diffusion Policies on Cross-Embodiment Human DemonstrationsICRA 2026
X-Diffusion: Training Diffusion Policies on Cross-Embodiment Human DemonstrationsICRA 2026 -
 X-Sim: Cross-Embodiment Learning via Real-to-Sim-to-RealOral Presentation @ CoRL 2025
X-Sim: Cross-Embodiment Learning via Real-to-Sim-to-RealOral Presentation @ CoRL 2025
Best Paper (Runner-Up) @ EgoAct Workshop, RSS 2025 -
-
 MOSAIC: A Modular System for Assistive and Interactive CookingCoRL 2024
MOSAIC: A Modular System for Assistive and Interactive CookingCoRL 2024
Best Paper @ VLNMN Workshop, ICRA 2024
Best Poster @ MoMa Workshop, ICRA 2024 -
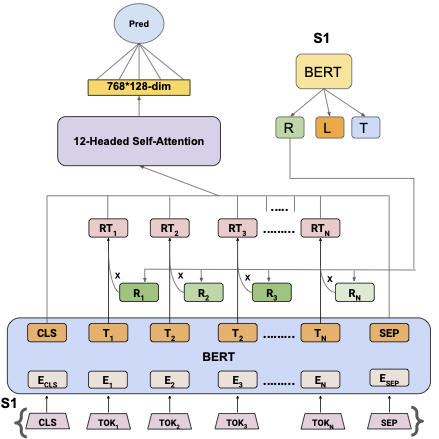
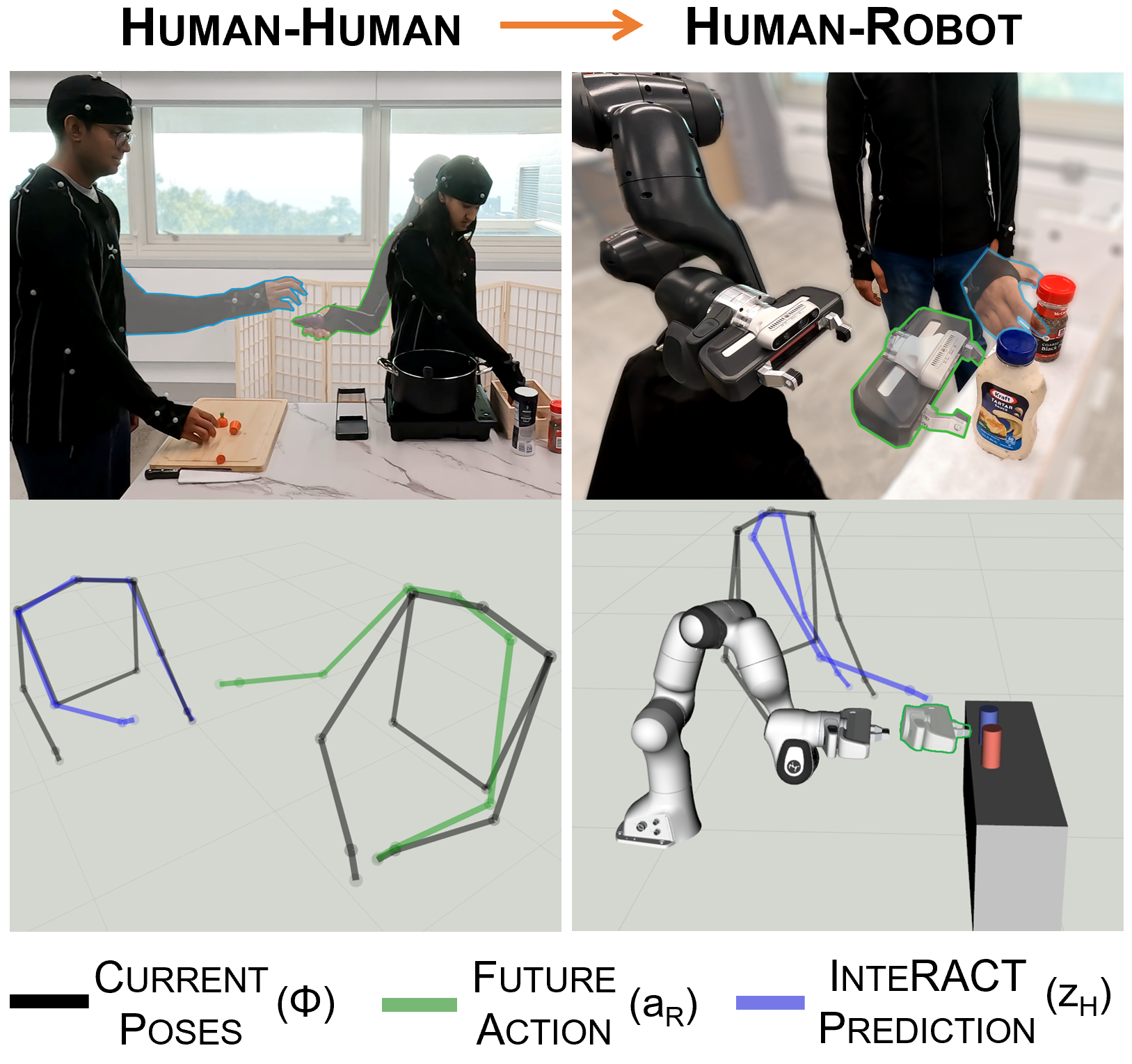 InteRACT: Transformer Models for Human Intent Prediction Conditioned on Robot ActionsICRA 2024
InteRACT: Transformer Models for Human Intent Prediction Conditioned on Robot ActionsICRA 2024 -
 ManiCast: Collaborative Manipulation with Cost-Aware Human ForecastingCoRL 2023
ManiCast: Collaborative Manipulation with Cost-Aware Human ForecastingCoRL 2023 -
-
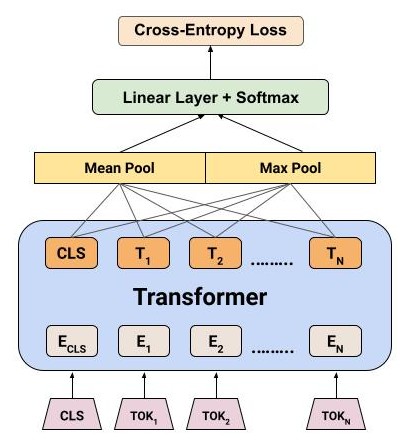
 Rationale-Guided Few-Shot Classification to Detect Abusive LanguageECAI 2023
Rationale-Guided Few-Shot Classification to Detect Abusive LanguageECAI 2023 -
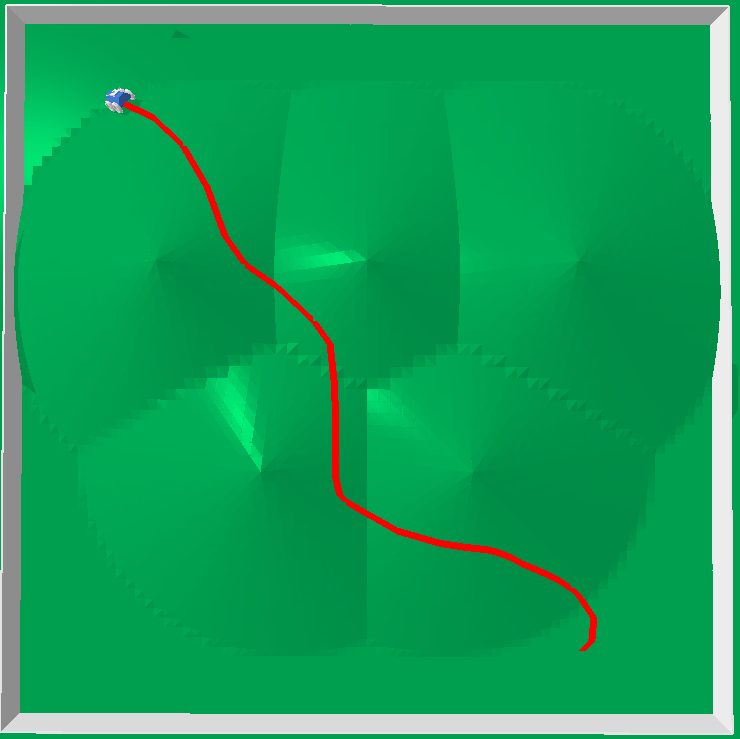 Terrain-Aware Learned Controllers for Sampling-Based Kinodynamic Planning over Physically Simulated TerrainsIROS 2022
Terrain-Aware Learned Controllers for Sampling-Based Kinodynamic Planning over Physically Simulated TerrainsIROS 2022 -
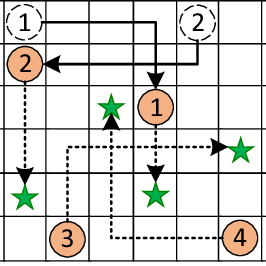 Optimal Multi-Agent Path Finding for Precedence Constrained Planning TasksArXiv
Optimal Multi-Agent Path Finding for Precedence Constrained Planning TasksArXiv -
 Offensive Language Identification in Dravidian LanguagesDravLangTech Workshop at ICRA
Offensive Language Identification in Dravidian LanguagesDravLangTech Workshop at ICRA -
 Robotic Motion Planning Using Learned Critical Sources and Local SamplingMLPC Workshop at IEEE International Conference on Robotics and Automation (ICRA)
Robotic Motion Planning Using Learned Critical Sources and Local SamplingMLPC Workshop at IEEE International Conference on Robotics and Automation (ICRA)












